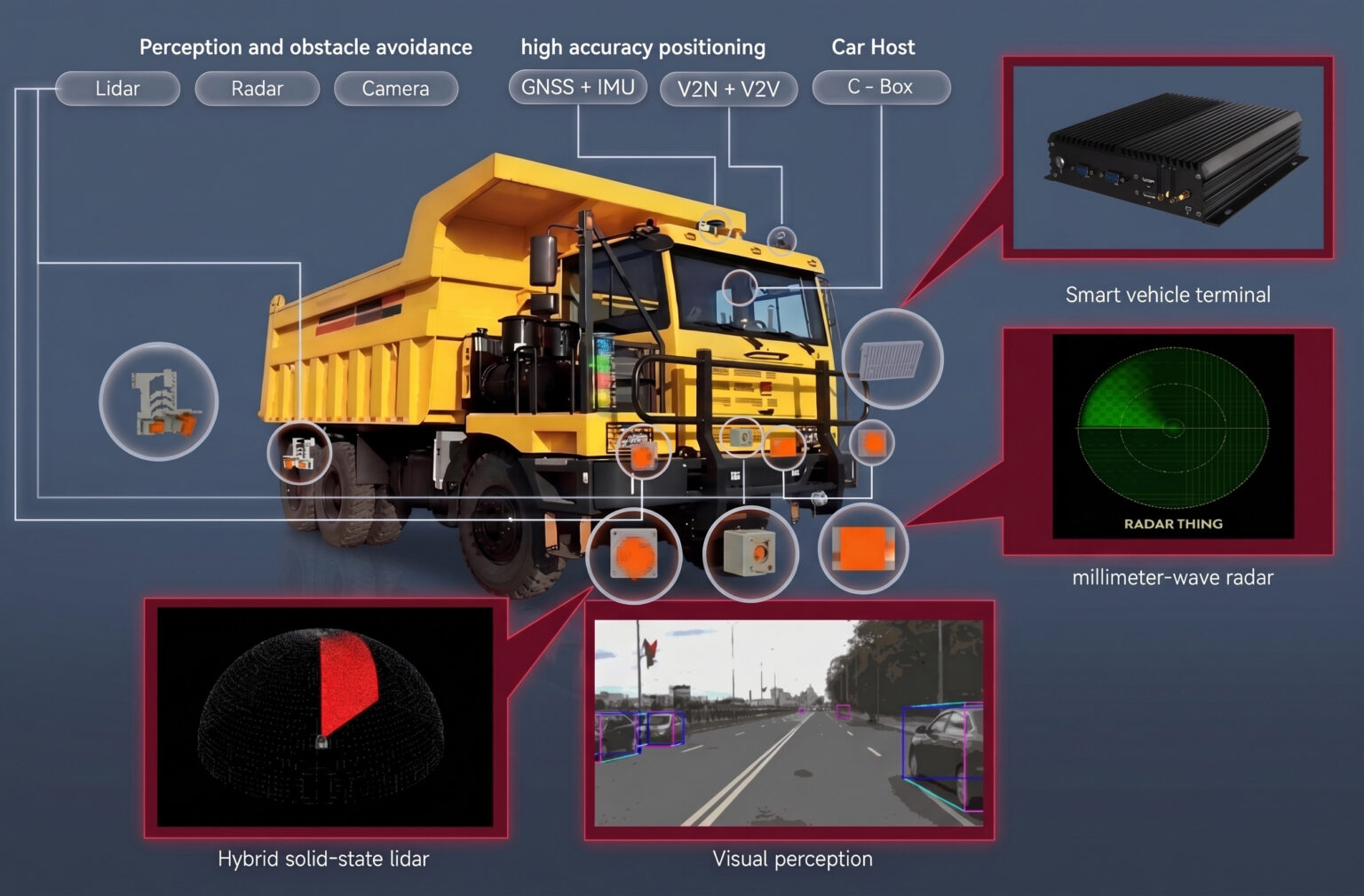
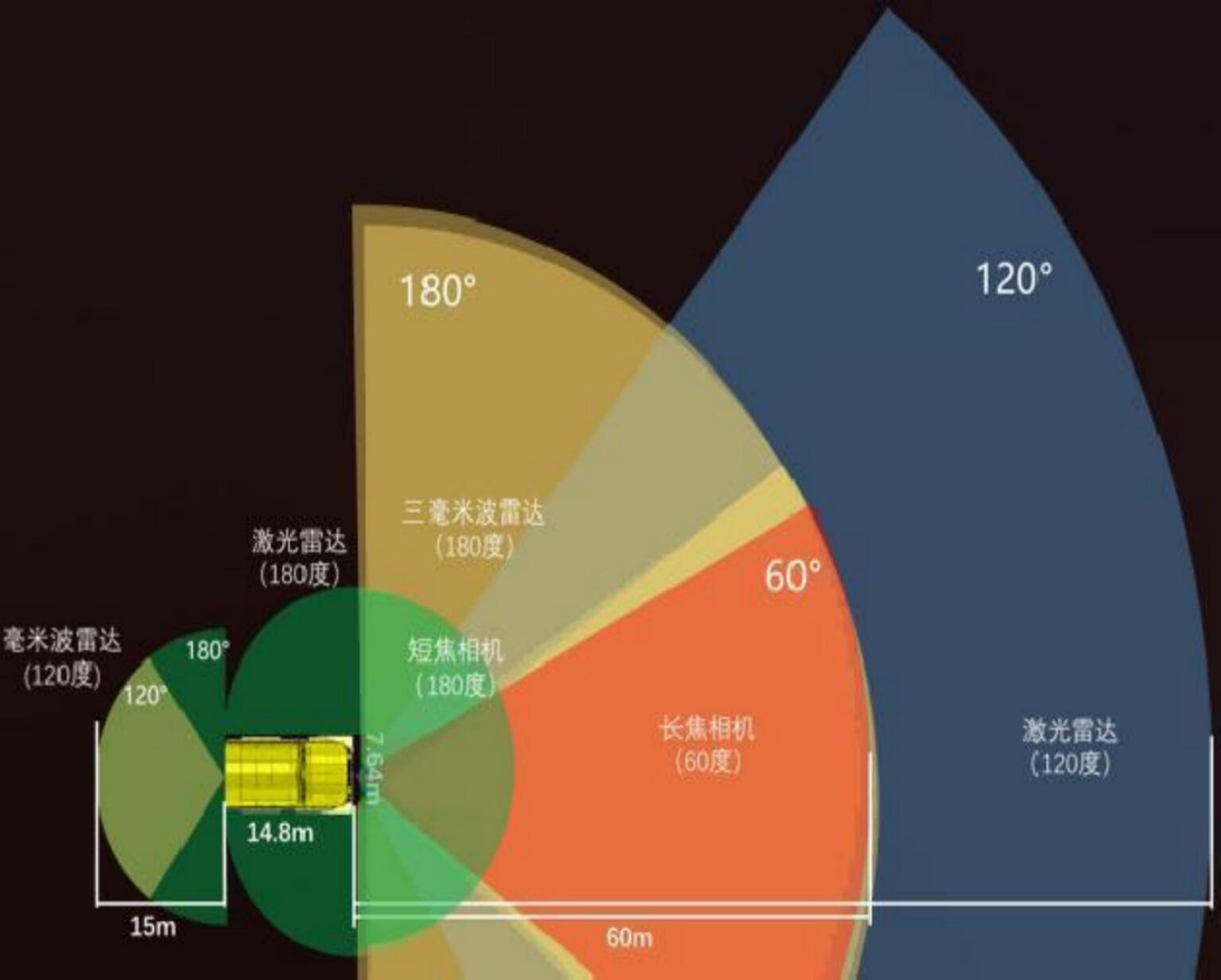
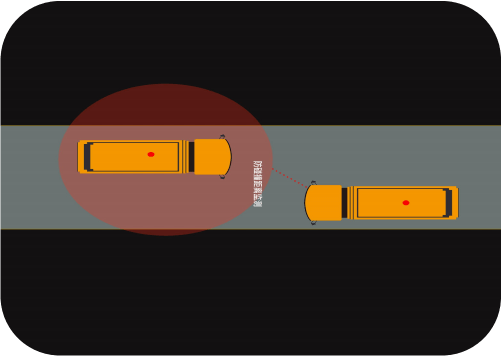
Environmental Perception
Perception is the core technology of autonomous driving. By monitoring the vehicle’s position, status, and surrounding environment (including pedestrians, vehicles, and obstacles), this system provides essential data support for the Decision-making System.